
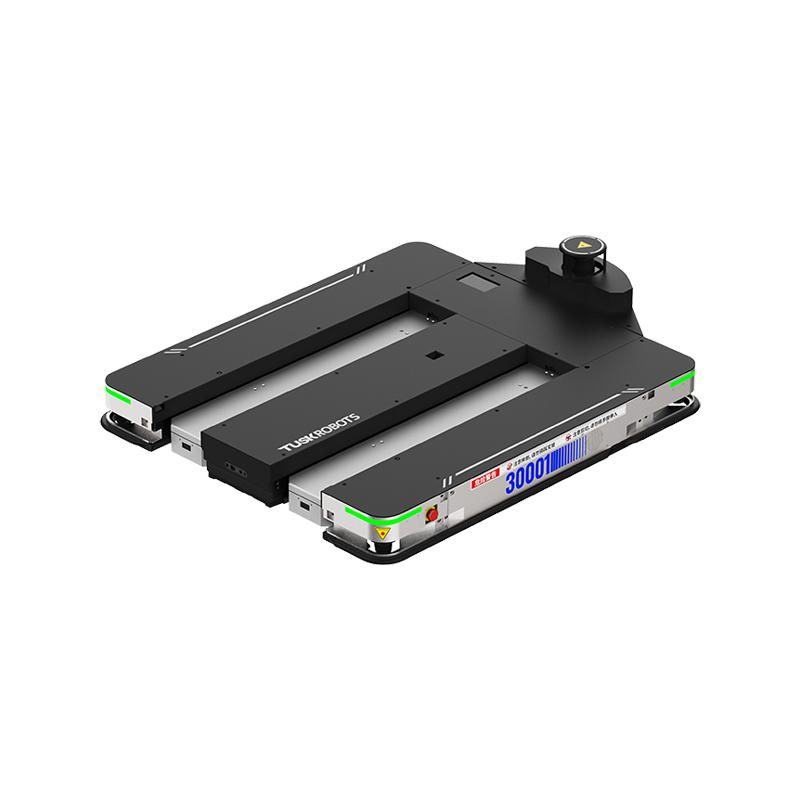

| 프로젝트 | 명세서 | E10(타이탄) | E10-SLAM(타이탄) |
| 기본 매개변수 | 크기(mm) | 1233x1102x170(보호 스트립 포함) | 1399x1102x170(SLAM 구성 요소를 높일 수 있음) |
| 최대 리프팅 무게(kg) | 정격 1200KG, 최대 1500KG | ||
| 자중(kg) | 310 | 320 | |
| 포크 높이(mm) | 90(적재 시 하향 플로팅 높이 7mm) | ||
| 포크 스트레치 아웃 최대 제한(mm) | 1400 | ||
| 최대 리프팅 높이(mm) | ≤330 | ||
| 표시 화면 | 5인치 | ||
| 통신 모드 | 기본 WIFI 버전: 듀얼 밴드 2.4G/5G, IEEE802.11b/g/n 지원(-5G 버전은 5G 통신 지원) | ||
| 안전 보호 | 장애물 회피 보호 | 전면 이중 레이저 센서 후면 이중 레이저 센서 | |
| 전방 레이저 감지 거리(m) | 0-3 | ||
| 기계적 보호 | 비상 정지 버튼, 리셋 버튼, 차체 전체를 감싸는 보호 스트립 | ||
| 주의 기능 | 음성 및 광전 경보 기능 포함 | ||
| 포크 팁 보호 | 광전 센서 감지 거리 ≤100mm, 충돌 스위치 | ||
| 움직임 능력 | 탐색 모드 | DM 코드 | SLAM DM 코드 듀얼 네비게이션 |
| 최대 속도(최대 부하/빈 부하)(m/s) | 1.5/1.2 | ||
| 정격 가속도(m/s²) | 1 | ||
| 정지 정확도 | ±5mm /±1° | ±10mm /±2° | |
| 이동 모드 | 이중 휠 차동 장치 | ||
| 지반 적응 간격 경사 단계 | 40mm(간극)/4°(7%)(기울기)/15mm(단차) | ||
| 포크 확장이 최대에 도달할 때 최대 경사 | 2° | ||
| 리튬 배터리 성능 | 정격전압/용량 | 51.2V/30AH | |
| 배터리 수명 | 완전 충전 횟수: 1500회(배터리 용량은 새 배터리의 70% 이상 보장) | ||
| 배터리 내구성/충전 시간 | ≥6H/≤1.5H | ||
| 배터리 오타 | LFP | ||
| 환경 | 사용온도(℃) | 0~45 | |
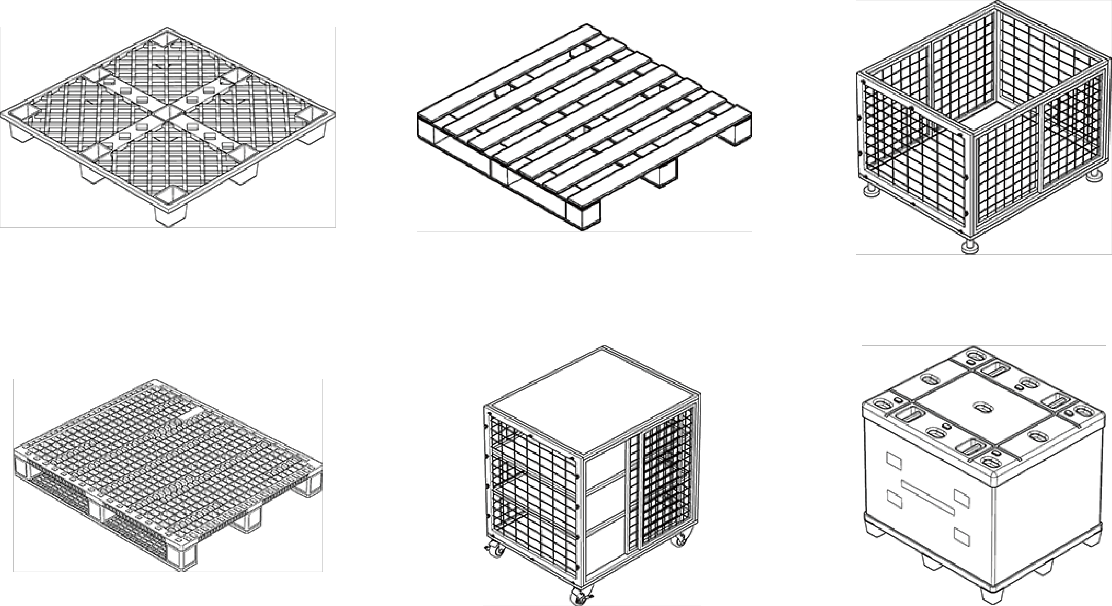
| 짚자리 요구 사항 | W1 및 W2의 너비(mm) | W1≤190. 700≤W2≤950 | |
| 팔레트 길이(mm) | ≤1400 | ≤1300 | |
| 팔레트 개방 높이(mm) | 120-130 | ||
|
사양
|
매개 변수
|
Types
|
|
|
내부 너비
슬롯 W1 (mm)
|
W1≤160
|
 |
|
|
구멍 W2 (mm)의 외부 폭
|
W2≥600
|
||
|
내부 팔레트
고도 H (mm)
|
95≤H≤130
|
||
|
팔레트 길이
L (mm)
|
≤1400 (DM 코드 버전)
|
≤1300(SLAM 버전)
|
|
 |
|||
최신 기업 및 업계 뉴스를 제공합니다.
산업 처리 로봇 물체의 회전 각도를 실시간으로 추적 할 수 있습니다. 이 기술은 일반적으로 시각적 센서, 가속도계, 자이로 스코프 및 힘/토크 센서와 같은 센서 시스템에 의존합니다. 이 센서를 통해 로봇은 운송 중에 가능한 회전 또는 기울기를 캡처 하고...
자세히 보기예, 산업 처리 로봇 객체의 이미지와 깊이 정보를 캡처 할 수 있습니다. 이것은 일반적으로 RGB 카메라, 3D 카메라, 구조화 된 라이트 센서, LIDAR 또는 스테레오 비전 시스템과 같은 여러 시각적 센서 및 깊이 인식 장치를 통합하여 달성됩니다....
자세히 보기예, 산업 처리 로봇 체중 정보를 기반으로 정확한 정렬을 수행 할 수 있습니다. 통합 힘/토크 센서 또는 계량 시스템을 통해 로봇은 객체를 처리하고 전송하는 동안 실시간으로 정확한 가중치 데이터를 얻을 수 있습니다. 이 데이터를 사용하여 로봇은 특히 ...
자세히 보기예, 산업 처리 로봇 취급 프로세스 중에 실시간으로 무게를 측정 할 수 있습니다. 이것은 일반적으로 로봇의 파악 끝 또는 암 끝에서 힘/토크 센서를 통합하여 달성됩니다. 이 센서는 객체의 무게 변화를 실시간으로 모니터링하고 로봇 제어 시스템에 피드백을...
자세히 보기 마케팅 부서 이메일
마케팅 부서 이메일marketing @tuskrobots.com
 인사팀 이메일
인사팀 이메일hr @tuskrobots.com
제품 및 솔루션 문의 info @tuskrobots.com
 문의
문의 +86-400-8808-310
스마트 팩토리와 스마트 기능의 역량을 강화하여 보다 쉽고 효율적으로 처리할 수 있도록 최선을 다하고 있습니다.






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어















-1.jpg?imageView2/2/format/jp2)
.jpg?imageView2/2/format/jp2)


.jpg?imageView2/2/format/jp2)

