그만큼
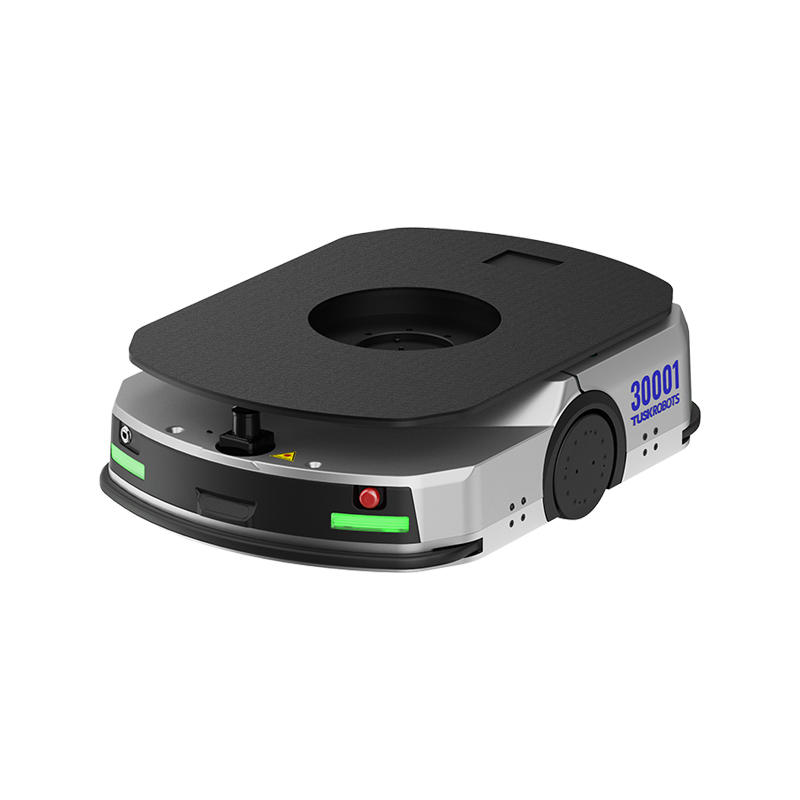
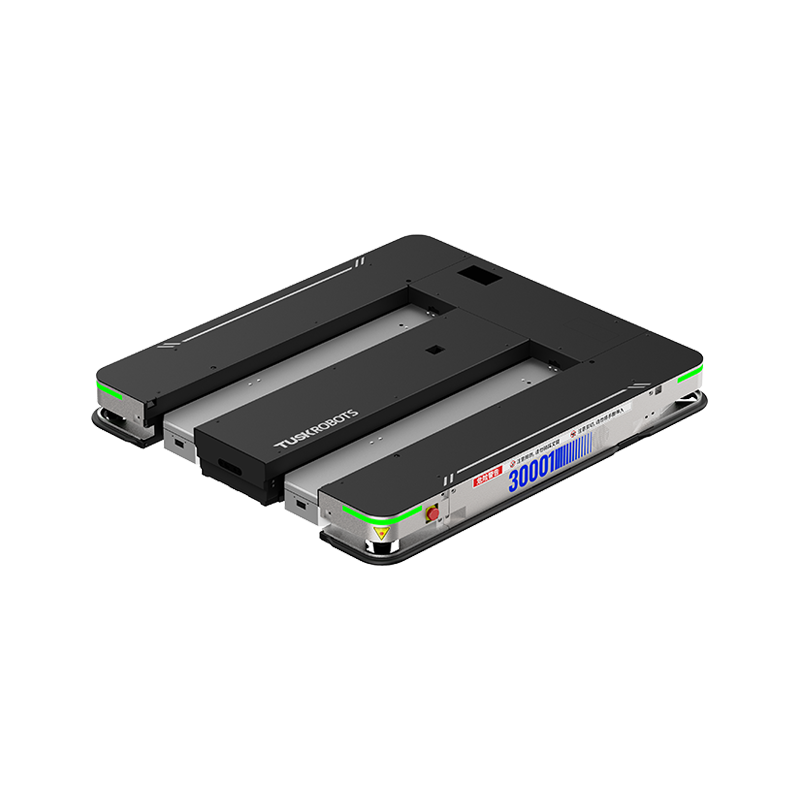
팔레트 핸들링 로봇 충전 스테이션 일반적으로 후속 주요 구성 요소로 구성됩니다.
1. 충전 시스템: 충전 스테이션에는 로봇 배터리에 에너지를 공급하고 충전하기 위해 일반적으로 전원 및 충전기인 충전 장치가 장착되어 있습니다. 이러한 장치는 로봇의 배터리 사양과 충전 요구 사항을 충족하려고 합니다.
2. 충전 포트 또는 커넥터: 충전 스테이션에는 로봇이 삽입할 수 있는 충전 포트 또는 커넥터가 준비되어 있습니다. 이는 로봇과 충전 장치 사이의 물리적 인터페이스로, 충전 연결의 안정성과 안전성을 보장합니다.
3. 내비게이션 및 포지셔닝 장치: 충전소에는 일반적으로 로봇이 충전소의 위치를 적절하게 찾는 데 도움이 되는 내비게이션 및 포지셔닝 구조가 포함됩니다. 여기에는 랜드마크, 간판, LiDAR 및 방향 계획 알고리즘을 포함하는 센서가 포함될 수도 있습니다.
4. 기계식 도킹 장치: 로봇이 충전 스테이션에 주차된 동안 충전 포트에 도킹할 수 있도록 기계식 도킹 시스템을 충전 스테이션에 준비할 수 있습니다. 이는 자동화된 정렬 메커니즘, 커넥터 잠금 장치 등으로 구성될 수 있습니다.
5. 통신 인터페이스: 배터리 인기, 충전 인기 및 다양한 정보를 포함한 사실을 전송하기 위해 충전소와 로봇 사이에 구두 교환 인터페이스가 있을 수 있습니다. 이를 통해 로봇의 충전 방식과 배터리 적합성 상태를 선별할 수 있습니다.
6. 안전 기계: 충전소는 과충전 방지, 과열 안전, 빠른 회로 안전 등을 포함하는 일련의 안전 구조로 준비되어 로봇 배터리에 대한 위험이나 해가 발생하지 않도록 할 수 있습니다. 충전 과정.
7. 충전소 식별: 충전소에 표지판, 증상이 있거나 수동 로봇이 충전소를 찾고 충전소의 평판에 대한 사실을 직원에게 제공할 수 있는 디스플레이가 표시될 수 있습니다.
8. 충전 명성 표시기: 충전소에 LED 조명이나 다양한 표시 장치가 있어 충전소의 평판과 사용 가능 마일 수 또는 충전 여부를 표시할 수 있습니다.
9. 전력 제어 시스템: 일부 충전소에는 두 대의 로봇에 동시에 충전 서비스를 제공해야 하는 것처럼 전력 자원을 동적으로 할당할 수 있는 전기 제어 장치가 장착될 수 있습니다.
10.비상 정지 도구: 충전 과정에서 확실한 안전을 보장하기 위해 충전소에 비상 방지 버튼 또는 기타 비상 정지 도구를 장착하여 원하는 동안 충전 절차를 즉시 방지할 수 있습니다.
 마케팅 부서 이메일
마케팅 부서 이메일 인사팀 이메일
인사팀 이메일 문의
문의 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어

















.jpg?imageView2/2/format/jp2)
