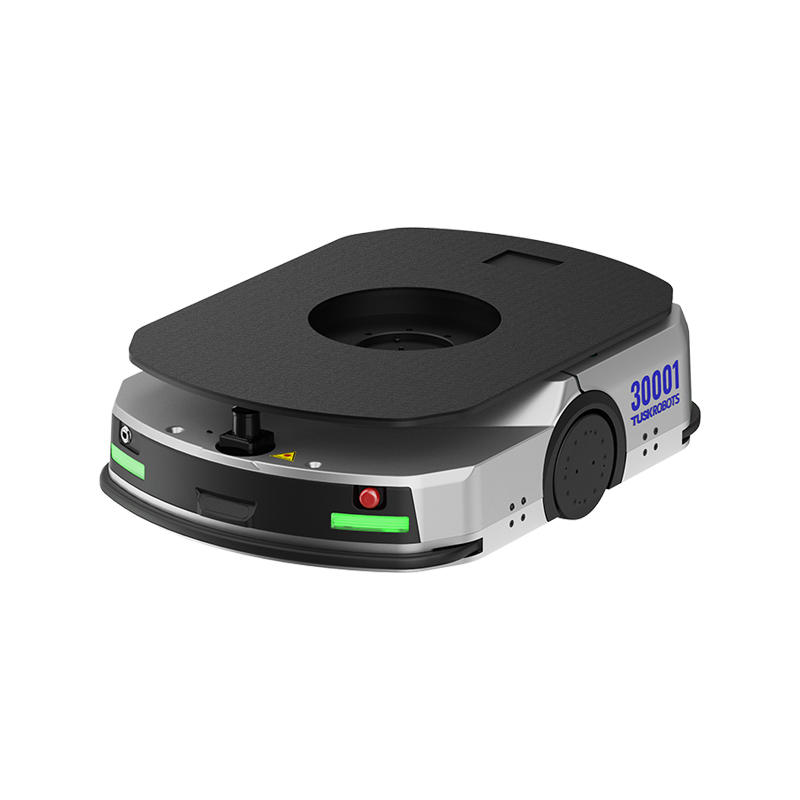
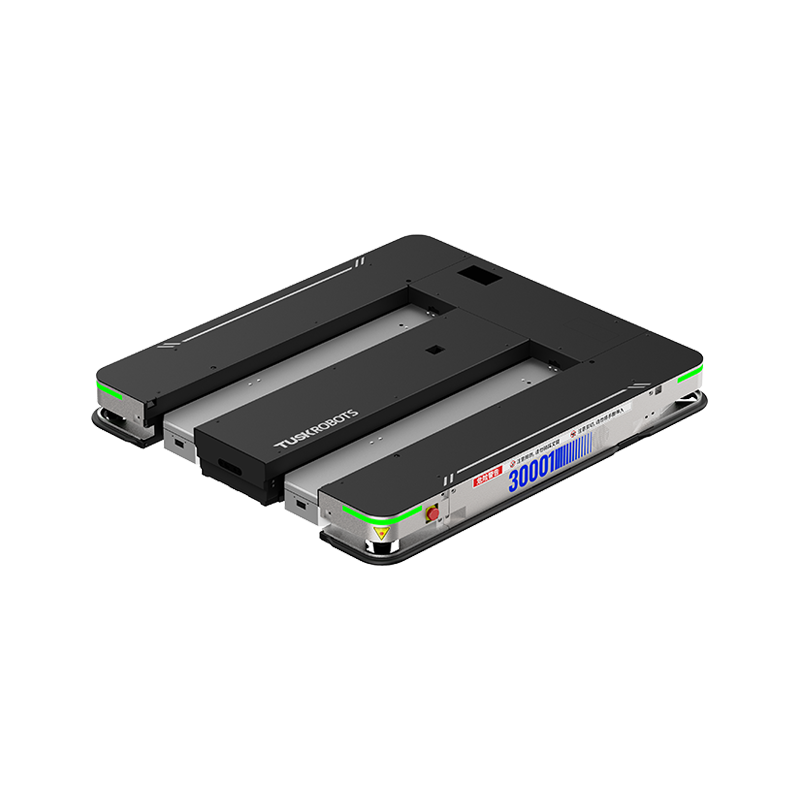
팔레트 핸들링 로봇 팬데믹 상황에서 많은 기업은 생산 및 공급망 운영을 재평가해야 했습니다. 이는 특히 조립, 피킹, 포장, 팔레타이징 및 머신 텐딩과 같은 노동 집약적인 작업에 의존하는 경우에 해당됩니다. 물리적으로 까다로운 애플리케이션을 위해 인력을 고용하고 유지하는 대신 기업은 생산성 향상 및 비용 절감을 포함한 다양한 이점을 위해 자재 취급 로봇으로 전환했습니다.
가장 기본적이고 일반적으로 사용되는 자재 취급 로봇 애플리케이션 중 하나는 부품 이송 또는 한 위치에서 다른 위치로 부품을 이동하는 것입니다. 암 도구의 오른쪽 끝과 결합하면 자재 취급 로봇이 제품을 필요한 곳으로 빠르고 정확하게 옮길 수 있습니다.
또 다른 일반적인 자재 취급 로봇 애플리케이션은 기본적으로 완제품을 선적 컨테이너로 옮기는 포장입니다. 이 응용 프로그램에서 로봇 컨트롤러를 랩톱 또는 데스크톱 컴퓨터(또는 내부/인터넷) 네트워크에 연결하여 인간이 수행하는 작업을 수행하도록 로봇을 프로그래밍할 수 있습니다.
마지막으로 분류는 순서나 순서에 따라 서로 다른 요소를 분류하는 일반적인 자재 취급 로봇 애플리케이션입니다. 이것은 로봇이 라벨, 바코드 또는 기타 표시를 읽고 해석할 수 있도록 하는 비전 및/또는 식별 시스템과 로봇 시스템을 통합하여 수행할 수 있습니다.
자재 취급을 위해 로봇 시스템을 사용할 때 반복성은 속도와 페이로드에 따라 변한다는 점을 염두에 두는 것이 중요합니다. 동작 중 로봇 축의 위치는 "컴플라이언스"에 의해 영향을 받기 때문입니다. 컴플라이언스는 로봇 암과 그 베이스 사이의 상대적인 움직임으로 인해 발생하며 고속 및/또는 무거운 페이로드 작업 중 오버슈트의 원인이 될 수 있습니다.

 마케팅 부서 이메일
마케팅 부서 이메일 인사팀 이메일
인사팀 이메일 문의
문의 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어

















.jpg?imageView2/2/format/jp2)
