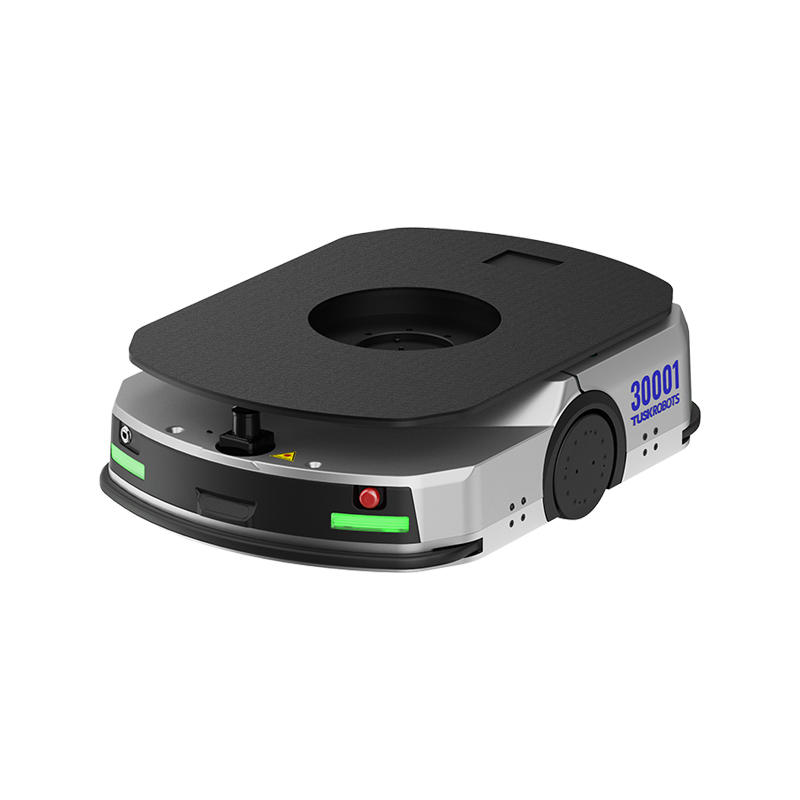
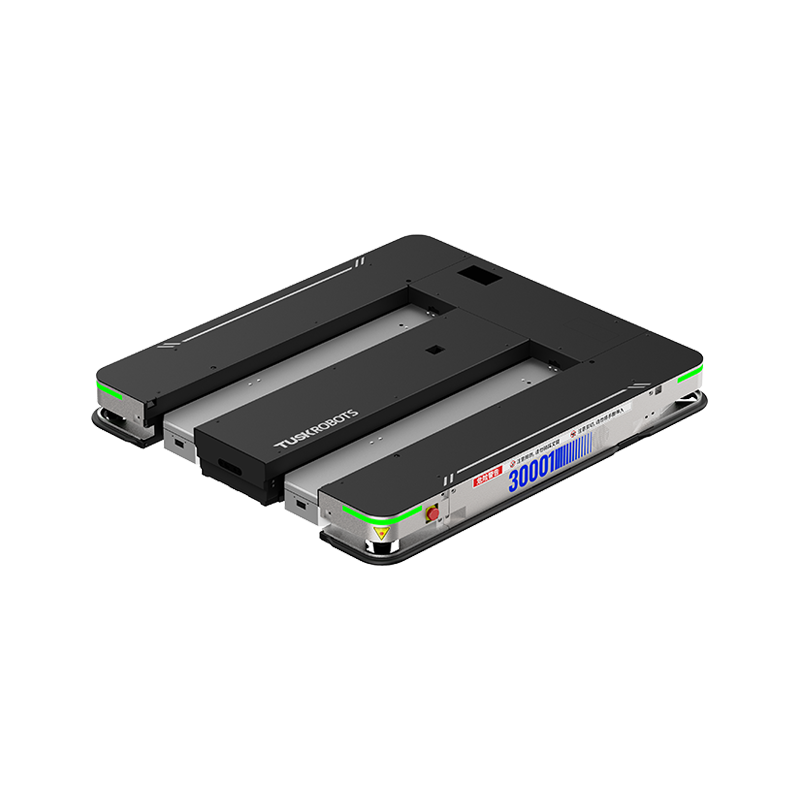
산업용 핸들링 로봇 일반적으로 로봇 팔이 장착되어 있습니다. 로봇 팔은 핸들링 작업을 수행하는 데 사용되는 핸들링 로봇의 중요한 구성 요소입니다. 사전 설정된 프로그램을 통해 로봇팔은 다양한 물체를 정확하게 파악, 이동, 배치할 수 있어 자동화된 핸들링이 가능합니다. 이러한 구성을 통해 산업용 핸들링 로봇은 대량의 품목을 자주 처리해야 하는 산업에서 강력한 보조자가 되어 생산 효율성을 향상시킬 뿐만 아니라 인건비도 절감합니다.
동시에 산업용 핸들링 로봇에는 자재 핸들링 작업을 위해 로봇 팔과 더 잘 협력하기 위해 컨베이어 벨트나 선반과 같은 다른 보조 장비가 장착될 수도 있습니다. 또한 적용 시나리오에 따라 로봇 팔의 디자인과 기능도 다양한 처리 요구 사항에 맞게 달라질 수 있습니다.
 마케팅 부서 이메일
마케팅 부서 이메일 인사팀 이메일
인사팀 이메일 문의
문의 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어

















.jpg?imageView2/2/format/jp2)
