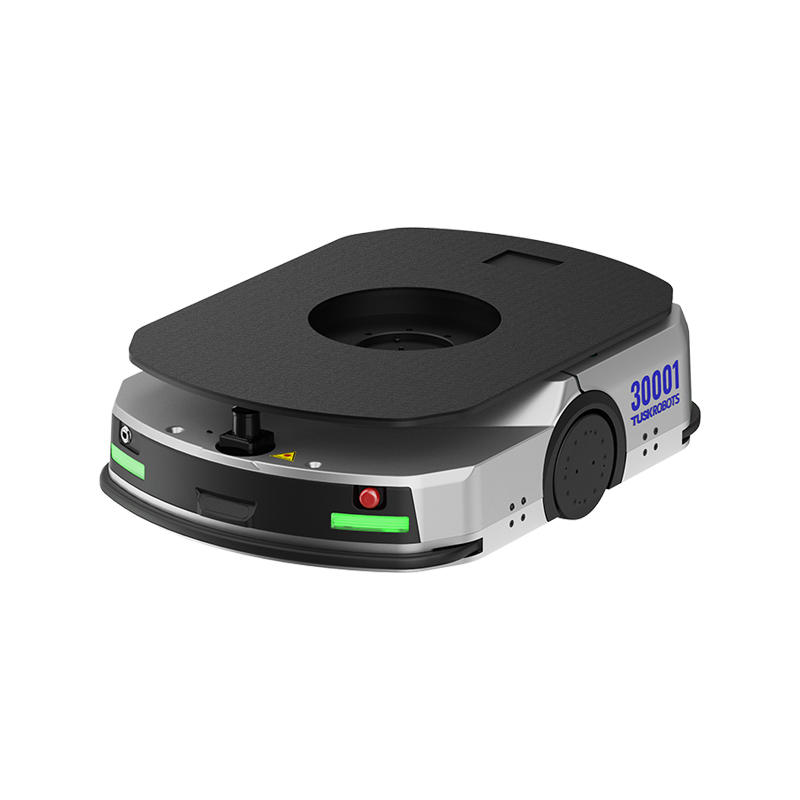
산업용 로봇, 특히 자동화된 자재 취급 로봇에서는 다음과 같습니다.
팔레트 로봇 , 센서 중복성은 주요 설계 고려 사항입니다. 센서 중복성은 단일 센서 오류가 발생할 경우 환경에 대한 안정적인 인식과 이해를 보장하기 위해 로봇의 센서 시스템에서 동일하거나 다른 유형의 여러 센서를 사용하는 것을 의미합니다. 이러한 중복성은 시스템의 견고성과 신뢰성을 향상시켜 로봇이 작동 중에 주변 환경의 변화를 정확하게 인식하고 대응할 수 있도록 보장합니다.
다음은 팔레트 로봇 센서 시스템의 이중화에 대한 몇 가지 주요 측면입니다.
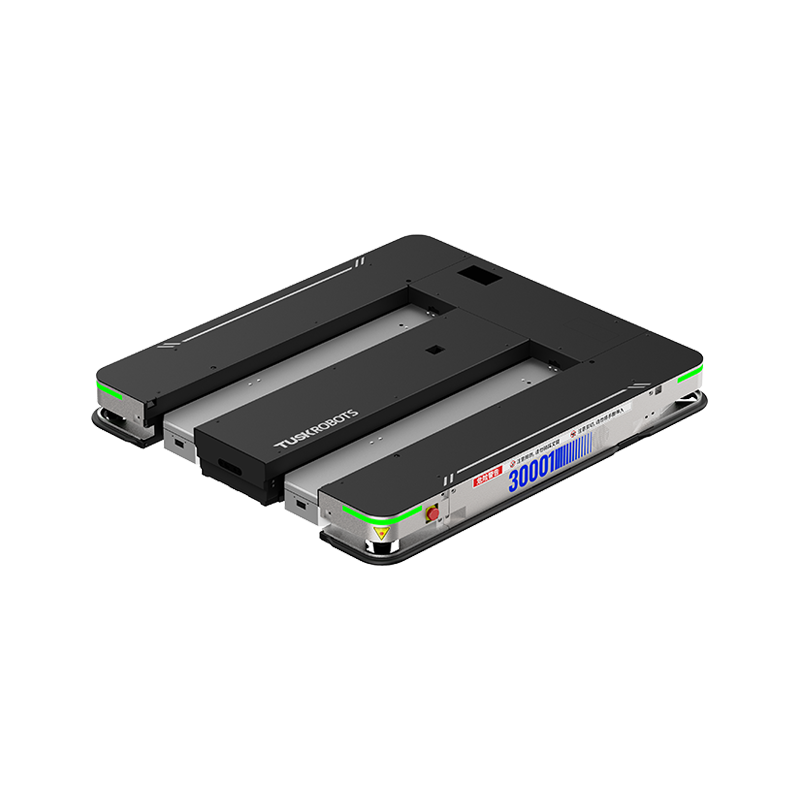
1. 다양한 유형의 센서: 팔레트 로봇은 일반적으로 LiDAR, 카메라, 초음파 센서 등과 같은 여러 유형의 센서를 통합합니다. 이러한 다양한 유형의 센서는 고유한 환경 인식 기능을 제공하여 시스템의 이해와 인식을 높일 수 있습니다. 환경.
2.동일한 유형의 센서 중복: 일부 중요한 센서 응용 분야에서 팔레트 로봇은 중복 감지를 달성하기 위해 동일한 유형의 여러 센서를 설치할 수 있습니다. 예를 들어 로봇에는 여러 개의 Lidar 센서가 장착되어 있어 하나의 센서가 고장나더라도 다른 센서를 사용하여 환경에 대한 인식을 유지할 수 있습니다.
3. 센서 데이터 융합: 팔레트 로봇의 제어 시스템은 일반적으로 다양한 센서의 데이터를 융합합니다. 다양한 센서가 제공하는 정보를 종합적으로 활용함으로써 로봇은 보다 포괄적이고 정확한 환경 인식 데이터를 획득하여 다양한 작업 시나리오와 상황을 보다 효과적으로 처리할 수 있습니다.
4. 자동 오류 감지 및 전환: 센서에 오류가 발생하면 일반적으로 팔레트 로봇의 제어 시스템이 자동으로 오류를 감지하고 백업 센서로 전환합니다. 이러한 자동 전환을 통해 센서 오류가 발생하더라도 로봇은 작업 효율성을 중단하거나 저하시키지 않고 계속 작업할 수 있습니다.
5. 교체 가능한 센서 모듈: 유지 관리 및 수리의 용이성을 위해 팔레트 로봇의 일부 센서는 모듈식 설계를 채택하여 전체 로봇 시스템을 대규모로 수리할 필요 없이 결함이 있는 센서를 백업 모듈로 교체할 수 있습니다.
이러한 중복 센서 설계를 통해 팔레트 로봇은 센서 고장이나 비정상적인 상황이 발생하는 경우에도 높은 수준의 작동 신뢰성과 안전성을 유지할 수 있습니다. 이 설계는 로봇이 자신의 환경을 정확하게 인식하고 잠재적인 위험과 충돌을 효과적으로 피함으로써 인력과 장비의 안전을 보호할 수 있도록 보장합니다.
 마케팅 부서 이메일
마케팅 부서 이메일 인사팀 이메일
인사팀 이메일 문의
문의 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어

















.jpg?imageView2/2/format/jp2)
