산업용 핸들링 로봇 실제로 실시간 센서 데이터와 피드백 정보를 기반으로 조정될 수 있습니다. 이 능력은 현대 산업용 로봇의 지능과 자동화의 중요한 표현입니다.
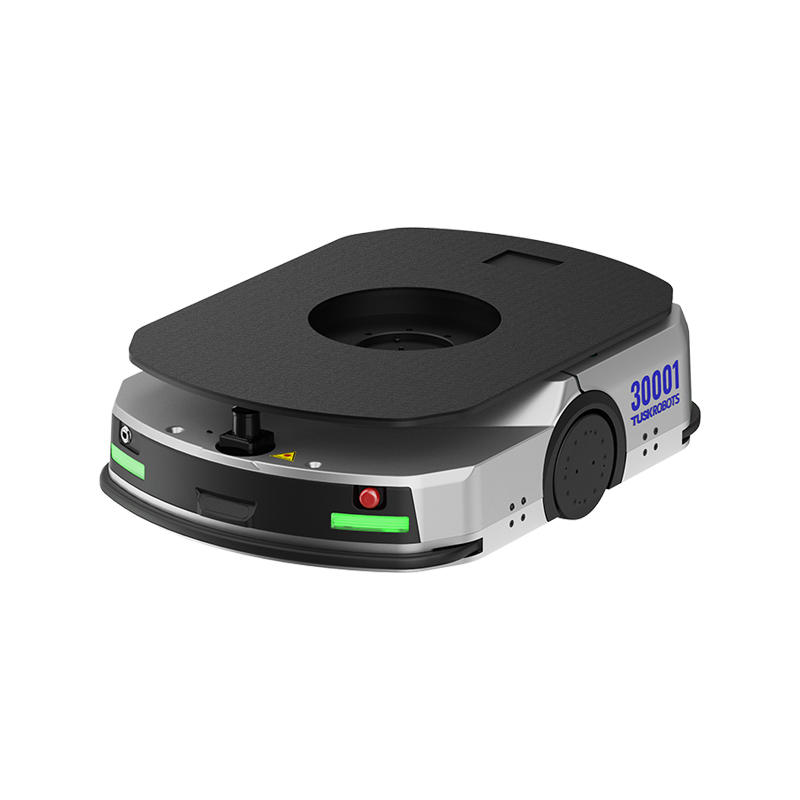
핸들링 로봇은 핸들링 작업을 수행할 때 카메라, 레이저 스캐너, 관성측정장치(IMU) 등 로봇 본체에 장착된 다양한 센서를 이용해 주변 환경을 실시간으로 모니터링하고 인지하게 된다. 이러한 센서는 작업 환경, 자재 위치, 이동 상태 및 잠재적인 장애물에 대한 많은 양의 데이터를 얻을 수 있습니다.
컴퓨터 프로그램과 고급 알고리즘을 통해 운송 로봇은 센서 데이터를 처리하고 분석할 수 있습니다. 데이터 처리에는 데이터의 정확성과 신뢰성을 향상시키기 위한 필터링, 잡음 제거, 신호 강화 등의 단계가 포함될 수 있습니다. 그런 다음 로봇은 이 데이터를 기반으로 해당 제어 명령을 생성하여 동작 궤적, 속도, 가속도 및 기타 매개변수를 조정하여 처리 작업의 정확한 실행을 보장합니다.
또한 핸들링 로봇은 학습하고 최적화하는 능력도 갖추고 있습니다. 로봇은 과거 데이터를 수집하고 분석함으로써 제어 전략과 알고리즘을 지속적으로 최적화하여 처리 효율성과 정확성을 향상시킬 수 있습니다. 동시에 로봇은 갑작스러운 환경 변화나 작업 변화에 대처하기 위해 실시간 피드백 정보를 기반으로 동적으로 조정할 수도 있습니다.
요약하면, 산업용 핸들링 로봇은 실시간 센서 데이터와 피드백 정보를 기반으로 조정하여 핸들링 작업을 원활하게 완료할 수 있습니다. 이러한 능력은 핸들링 효율성과 정확성을 향상시킬 뿐만 아니라 로봇의 적응성과 유연성을 향상시켜 복잡하고 변화하는 다양한 작업 환경에서도 안정적으로 작동할 수 있도록 해줍니다.
 마케팅 부서 이메일
마케팅 부서 이메일marketing @tuskrobots.com
 인사팀 이메일
인사팀 이메일hr @tuskrobots.com
제품 및 솔루션 문의 info @tuskrobots.com
 문의
문의 +86-400-8808-310
스마트 팩토리와 스마트 기능의 역량을 강화하여 보다 쉽고 효율적으로 처리할 수 있도록 최선을 다하고 있습니다.






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어

















.jpg?imageView2/2/format/jp2)
