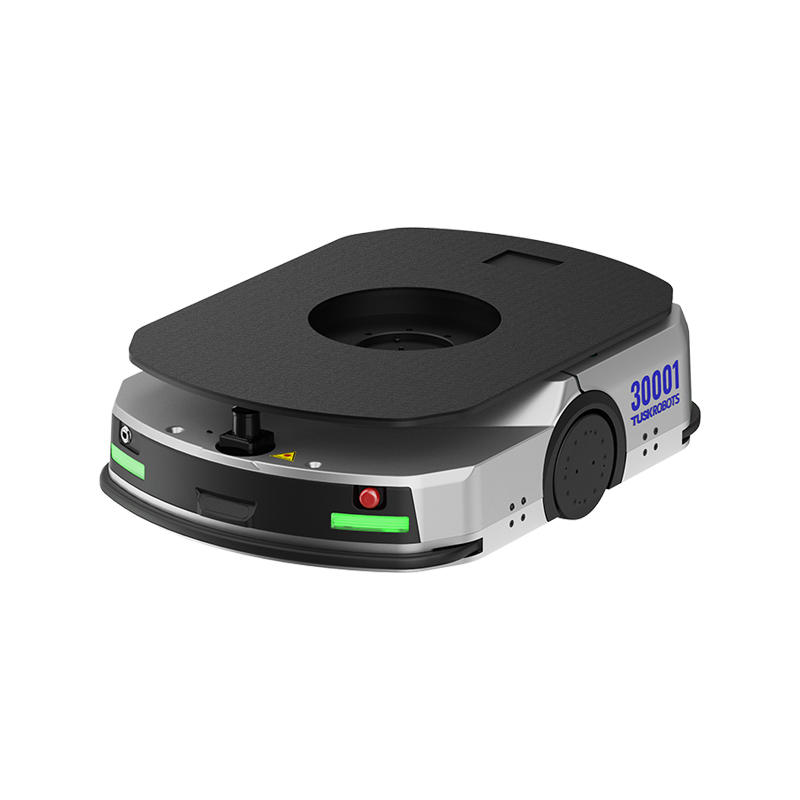
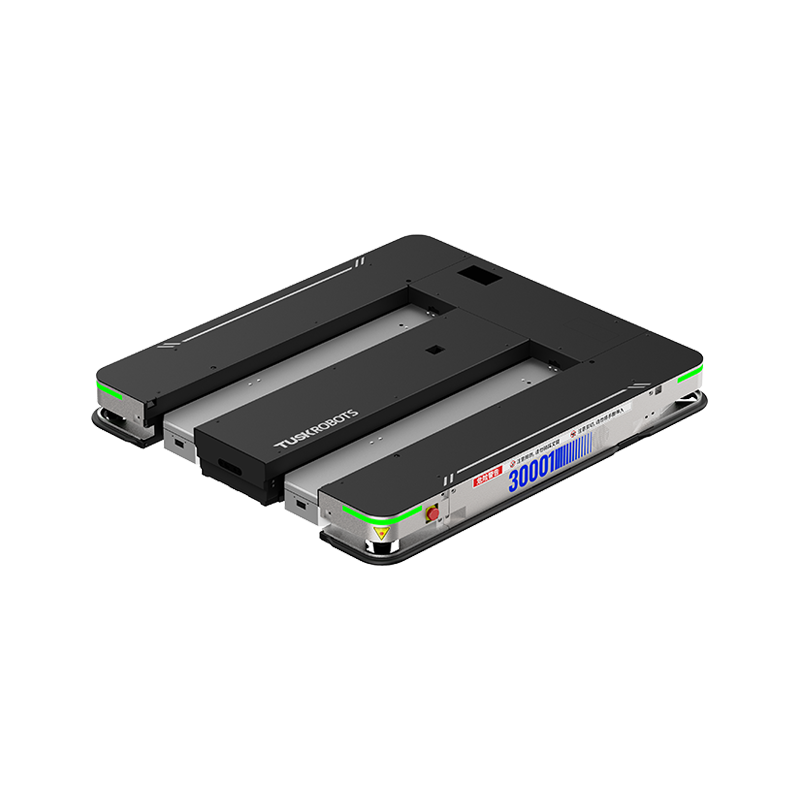
팔레트 핸들링 로봇 충전소 일반적으로 통신 인터페이스가 준비되어 있습니다. 이러한 인터페이스는 컴퓨터 충전 및 사실 전송을 포함하는 기능을 얻기 위해 로봇과 통신하는 데 사용됩니다. 로봇은 통신 인터페이스를 통해 충전 평판, 충전 수요, 배터리 수준 등의 통계를 자동으로 찾아 충전소에 자동으로 연결해 충전할 수 있습니다. 또한, 통신 인터페이스는 원거리 제어, 결함 진단, 정보 수집 등 로봇의 원거리 추적 및 제어에도 사용할 수 있습니다. 일반적인 언어 교환 인터페이스는 Wi-Fi 대화 인터페이스와 강조된 통신 인터페이스로 구성되며 구체적인 선택은 유틸리티 상황과 필요성에 따라 다릅니다.

 마케팅 부서 이메일
마케팅 부서 이메일 인사팀 이메일
인사팀 이메일 문의
문의 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어

















.jpg?imageView2/2/format/jp2)
